Defect Detection
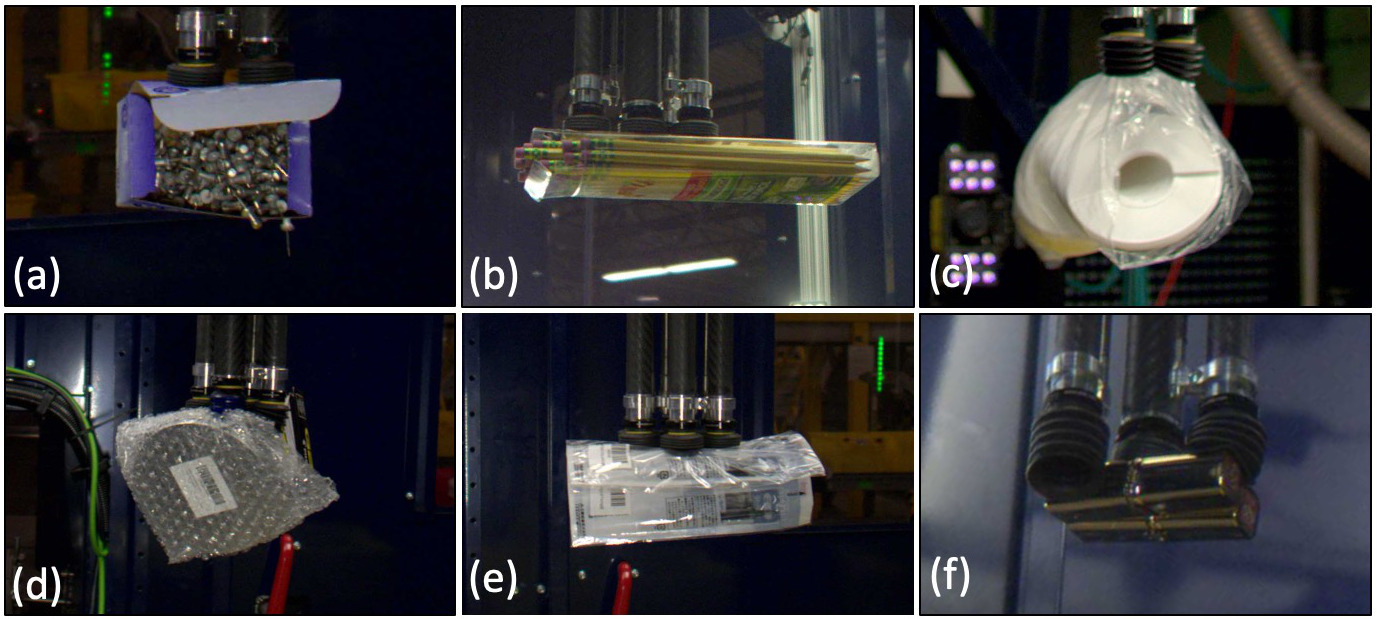
The defect detection task is to identify if a robotic manipulation activity resulted in a defect. Two types of robot-induced defects are included in the dataset: 1. multi-pick, and 2. package-defect. Multi-pick is used to describe activities where multiple objects were picked and transferred from the source container to the destination container. Package-defect is used to describe activities where the object packaging opened and/or the object separated into multiple parts deconstruction. Two subclasses, open and deconstruction, are defined for package-defect.