Object Identification
Object identification (ID) is the task of exactly identifying an image segment as one of the objects within a database. In the robotic manipulation context, this task is applicable both before and after picking the object. In the pre-pick stage, identifying an object segment within the tote allows accessing any stored models or attributes of the object from past experience which can be used for manipulation planning purposes. In the post-pick stage, ID has access to the segment of the object being manipulated both within the tote as well as when it is attached to the robotic arm.
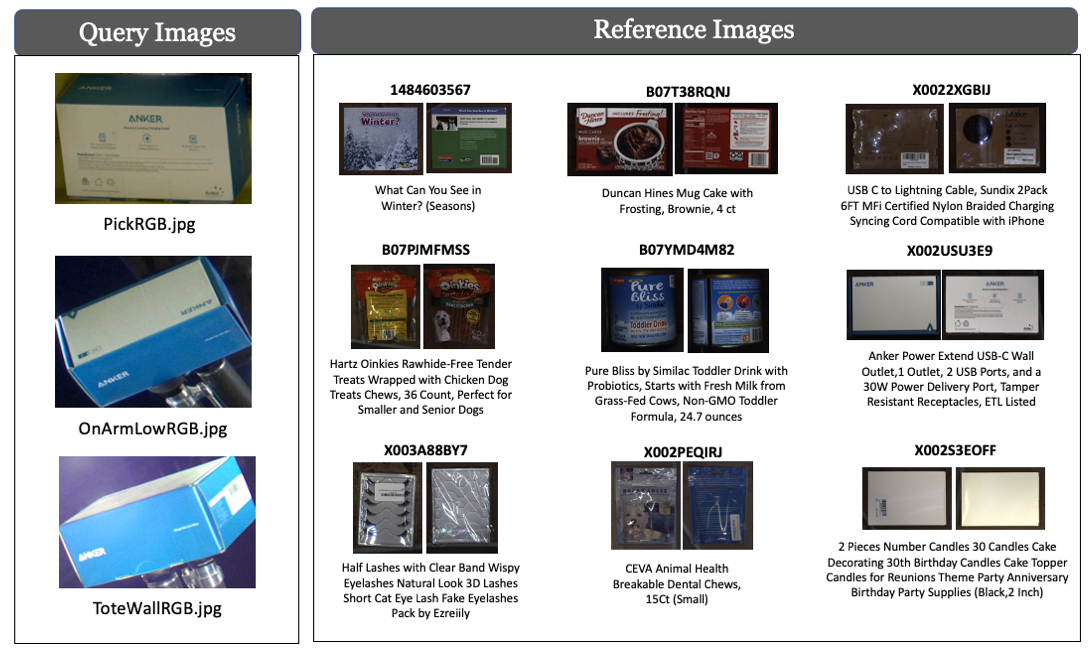
To evaluate this usecase, please download the following items:
- Picks: 235,000 pick activities with images of the picked object in tote and in robotic arm.
- Reference-images: Up to 6 images (1.jpg-6.jpg) corresponding to different product-ids.
- Train-Test-Split: List of training and test cases.
Each pick activity in the pick directory contains the following:
- Image of the object when it was in the container (PickRGB.jpg)
- Images of the object after pick (ToteWallRGB.jpg, OnArmLowRGB.jpg, FarTrayRGB.jpg)
- List of all products in the container before the picking starts. The file contains product-id, text description, weight and dimensions for all the products (container.json)
- Polygon segments for the object in above images, ground-truth product-id for the object (annotation.json)